-
Mobile Version
Scan with Mobile
- Member Center
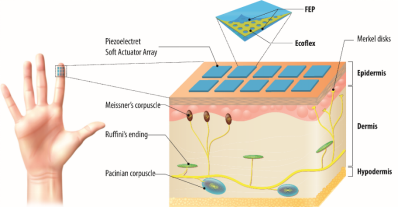
Another major branch of the developing haptics market is vibrotactile devices that provide mechanical feedback to users. Hand-held controllers for virtual reality, wearable devices and joysticks are a few examples that use vibrotactile actuation to provide haptic feedback. The overall performance of these devices relies heavily on the size and performance of actuators. Most of the currently used actuators for haptic applications are limited to motors, linear resonant actuators, pneumatic, piezoelectric, or magneto fluids. These actuators are often too bulky, heavy and consume relatively large amount of power to generate sufficient mechanical stimulus to vibrate skin tissue and excite the mechanoreceptors underneath.
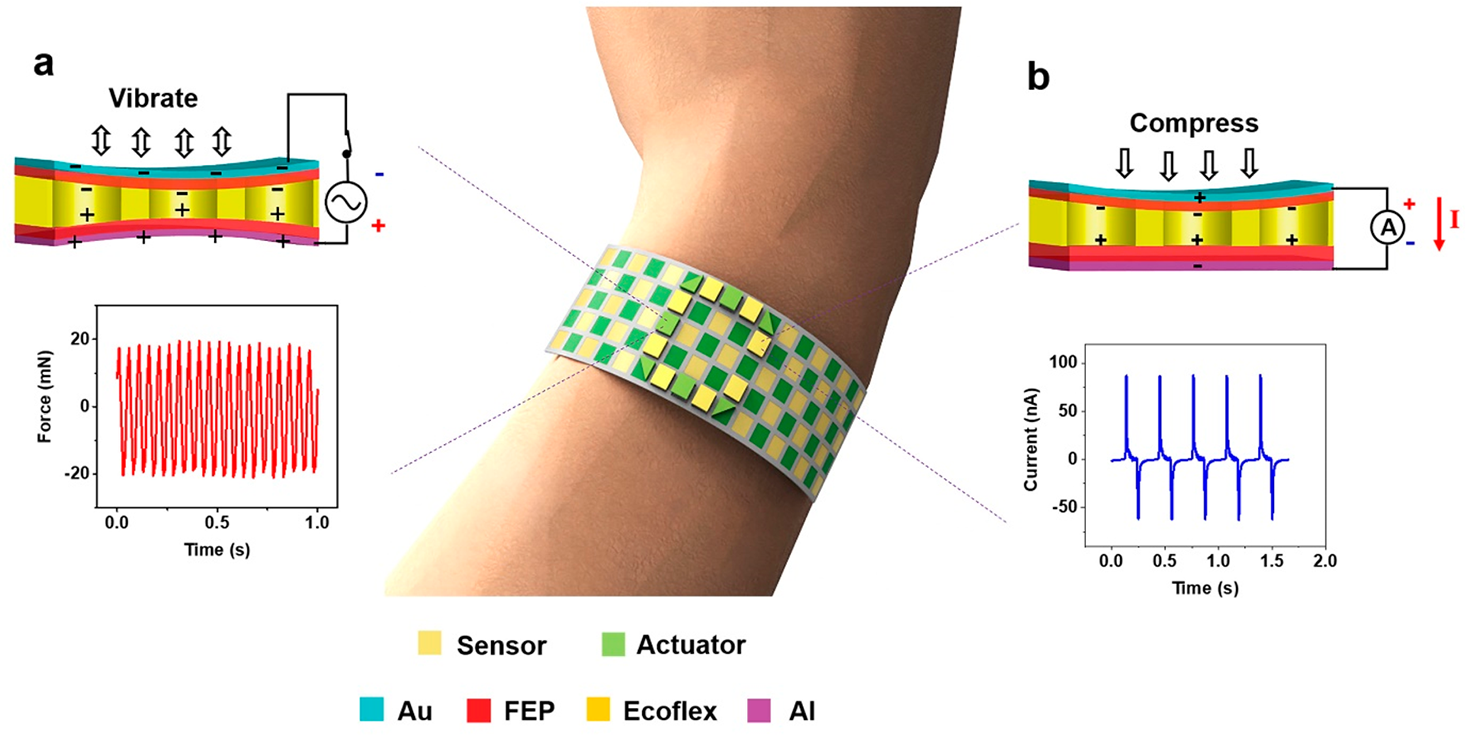
Different types of thin-film actuators have recently been developed, but their actuation force is usually weak and needs special configuration to be properly perceived by the human body. Our lab is interested in developing soft actuator arrays for effective haptic actuation. The tradeoff between size and actuation performance will be solved by approaches including focused acoustic waves and topological optimization.
> Yma@polyu.edu.hk
> Department of Mechanical Engineering
> Research Institute for Intelligent Wearable Systems (RI-IWEAR)
> FG 604, The Hong Kong Polytechnic University,
> Hung Hom, Kowloon, HK, P.R.C
> (+852) 2766 7823

Long Press to Scan QR Code
Scan QR Code

